
KI-basierte Roboterkalibrierung (KIRK)
DHBW Karlsruhe und Partner erforschen die Anwendung von Methoden der Künstlichen Intelligenz in der Praxis
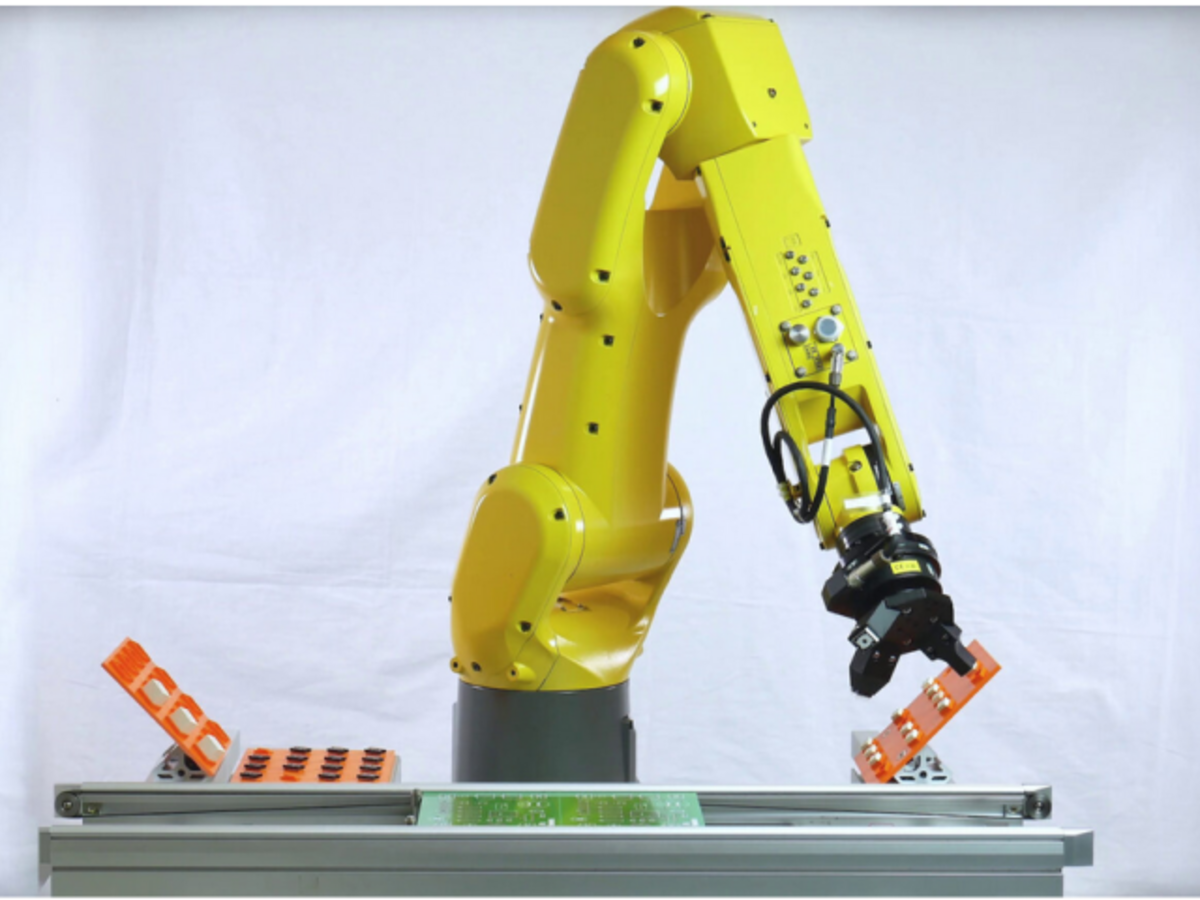
Anwendungsfälle wie die Bestückung von Leiterplatten erfordern hohe Positioniergenauigkeiten. Das Forschungsprojekt KIRK will die dafür notwendige Roboterkalibierung mithilfe von künstlicher Intelligenz (KI) beschleunigen.
Erweiterung der Einsatzmöglichkeiten von Industrie-Robotern durch intelligente Kalibriermethoden.
Stark fallende Hardware-Preise machen den Einsatz mehrachsiger Industrie-Roboter zunehmend auch außerhalb der Massenproduktion attraktiv. Sehr preiswerte Systeme erreichen allerdings für viele Anwendungen nicht die notwendige Genauigkeit. Mechanisch hochwertige Systeme müssen zeitaufwendig beim Hersteller in regelmäßigen Abständen nachkalibriert werden. Dafür fallen aber hohe Kosten an: Für einen entsprechenden Service bieten die Hersteller hochpreisige Hardware an. Die Roboter müssen zum Hersteller transportiert werden – ein kostenintensiver und zeitraubender Vorgang. Die Kalibrierung muss nach wenigen Jahren wiederholt werden. Sie ist zudem ausschließlich in einem schmalen Temperaturfenster gültig, sodass zeitaufwändige Warmlaufphasen notwendig sind, um in das Temperaturfenster einer gültigen Kalibrierung zu gelangen. Dieses Vorgehen ist insbesondere in der Einrichtungsphase einer Roboterapplikation extrem störend. Bestehende, auf parametrischen Modellen basierende „klassische“ Lösungen stoßen an die Grenzen ihrer Praktikabilität.
Das Projekt KIRK (KI-basierte Roboterkalibrierung) verfolgt daher das Ziel, mit den Möglichkeiten des Maschinellen Lernens neue Kalibrier-Methoden zu entwickeln, die flexibler in der Anwendung sind, zu höheren Genauigkeiten führen und damit die Einsatzmöglichkeiten der Industrie-Roboter erweitern. Im Fokus stehen hierbei softwaregetriebene Kalibriermethoden unter der Verwendung sogenannter tiefer neuronaler Netze (Deep Learning).
KIRK ist ein Gemeinschaftsprojekt des Robot- and Human-Motion-Lab (RaHM-Lab) der Dualen Hochschule Baden-Württemberg Karlsruhe, des Lehrstuhls für Kognitive Produktionssysteme des Instituts für Industrielle Fertigung und Fabrikbetrieb (IFF) der Universität Stuttgart und dem Robotik-Experten ArtiMinds Robotics GmbH.
Das IFF übernimmt im Projekt die Grundlagenforschung zur Erarbeitung neuer Methoden Maschinellen Lernens. Im RaHM-Lab der DHBW werden Bewegungsanalysen durchgeführt, Fehler charakterisiert und spezifische Messtechnik entwickelt, um die benötigten Lerndaten zu erzeugen. Gemeinsam mit dem Industriepartner ArtiMinds Robotics werden anschließend die Grundlagenmethoden auf reale industrielle Anwendungsfälle übertragen.
Das Forschungsprojekt KIRK wird vom Bundesministerium für Bildung und Forschung gefördert. Es wird von der Dualen Hochschule Baden-Württemberg Karlsruhe unter der Leitung von Prof. Dr. Marcus Strand, Leiter des Studiengangs Informatik an der DHBW Karlsruhe koordiniert.
Weitere Informationen: https://www.karlsruhe.dhbw.de/rahmlab
Text: DI/MS; Foto: ArtiMinds Robotics GmbH